Page 30 - Fister jr., Iztok, and Andrej Brodnik (eds.). StuCoSReC. Proceedings of the 2018 5th Student Computer Science Research Conference. Koper: University of Primorska Press, 2018
P. 30
njeni vmesnik GUI se sestoji iz treh glavnih delov: Algoritem 2 Psevdokoda za doloˇcanje sekvence za nasta-
vitev konfiguracije robota
• zajem podatkov in strukturiranje numeriˇcnega programa 1: if Rama is Levo then
ACMA za uˇcenje toˇck, 2: AcmaIzhod.append(”13 +0 13 +0\n”);
3: else if Rama is Spredaj then
• razˇclenjevanje podatkov in preverjanje zapolnjenost vr- 4: AcmaIzhod.append(”13 +0\n”);
stice in 5: end if
6: if Komolec is Zgoraj then
• pretvorba kroˇznih izsekov v translacije, kjer je to po- 7: AcmaIzhod.append(”@77 13 +0\n”);
trebno. 8: end if
9: if Zapestje is N izko then
V nadaljevanju ˇclanka opisujemo omenjene glavne dele po- 10: AcmaIzhod.append(”@77 @77 13 +0\n”);
drobneje. 11: end if
3.2.1 Zajem podatkov in struktura numericˇnega pro- Pri doloˇcitvi konfiguracije je potrebno biti pozoren na trans-
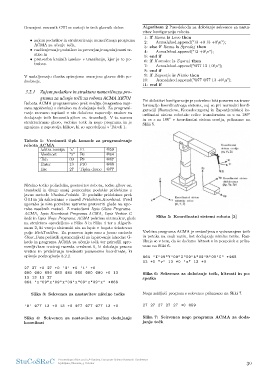
grama za ucˇenje tocˇk za robota ACMA XR701 formacijo koordinatnega sistema, saj se pri normalni konfi-
guraciji (Rama:levo, Komolec:zgoraj in Zapestje:nizko) ko-
Robota ACMA programiramo prek medija (magnetno zapi- ordinatni sistem robotske celice transformira os x za 180◦
sana zgoˇsˇcenka) s sintakso za dodajanje toˇck. Za programi- in os z za 180◦ v koordinatni sistem orodja, prikazano na
ranje moramo zapisati v niz doloˇceno zaporedje znakov za Sliki 5.
dodajanje toˇck linearnih gibov oz. translacij. V ta namen
strukturiramo glavo, vsebino toˇck in nogo programa in je
zgrajena z zaporedja klikov, ki so opredeljeni v Tabeli 1.
Tabela 1: Vrednosti tipk konzole za programiranje
robota ACMA @59
Izbira menija ’x’ F1
Vrednost ”x” F6 @64
Tab 09 F9 @67
Enter 13 F10 @68
Esc 27 Tipka desno @77
Niˇcelno toˇcko polizdelka, postavitev robota, toˇcke gibov oz. Slika 5: Koordinatni sistemi robota [3]
translacij in druge manj pomembne podatke pridobimo z
javno metodo Vhodni Podatki. Te podatke pridobimo prek Vsebina programa ACMA je sestavljena z vpisovanjem toˇck
GUI in jih arhiviramo v razred Pridobitev Koordinat. Pred in poteka na enak naˇcin, kot dodajanje niˇcelne toˇcke. Raz-
uporabo je nize potrebno ustrezno pretvoriti glede na upo- likuje se v tem, da ˇse dodamo hitrost v in pospeˇsek a prika-
rabo zasebnih metod. Z metodami Izpis Glave Programa zano na Sliki 6.
ACMA, Izpis Koordinat Programa ACMA, Izpis Vrstice G
kode in Izpis Noge Programa ACMA polnimo niz znakov, glede @64 "X"09"Y"09"Z"09"A"09"B"09"C" +@68
na strukturo opredeljeno s Sliko 3 in Sliko 4 ter z Algorit- 13 +0 "v" 13 +0 "a" 13 +0
mom 2, ki vrnejo sistemski niz za izpis v bogato tekstovno
polje RichTextBox. Za ponoven izpis smo z javno metodo Slika 6: Sekvenca za doloˇcanje toˇck, hitrosti in po-
Clear Data poˇcistili spremenljivki za izpisovanje izhodne G- speˇska
kode in programa ACMA za uˇcenje toˇck ter priredili spre-
menljivkam znotraj razreda vrednost 0, ki doloˇcajo prazno
vrstico in pridobivajo vrednosti posamezne koordinate, ki
opisuje podpoglavje 3.2.2.
27 27 +0 27 +0 ’3’ +0 ’1’ +0
@80 @80 @80 @80 @80 @80 @80 @80 +0 13
13 13 13 27
@64 "x"09"x"09"x"09"x"09"x"09"x" +@68
Slika 3: Sekvenca za nastavitev niˇcelne toˇcke Noga zakljuˇci program s sekvenco prikazano na Sliki 7.
’8’ @77 13 +0 13 +0 @77 @77 @77 13 +0 27 27 27 27 27 +0 @59
Slika 4: Sekvenca za nastavitev naˇcina dodajanje Slika 7: Sekvenca noge programa ACMA za doda-
koordinat janje toˇck
StuCoSReC Proceedings of the 2018 5th Student Computer Science Research Conference 30
Ljubljana, Slovenia, 9 October
vitev konfiguracije robota
• zajem podatkov in strukturiranje numeriˇcnega programa 1: if Rama is Levo then
ACMA za uˇcenje toˇck, 2: AcmaIzhod.append(”13 +0 13 +0\n”);
3: else if Rama is Spredaj then
• razˇclenjevanje podatkov in preverjanje zapolnjenost vr- 4: AcmaIzhod.append(”13 +0\n”);
stice in 5: end if
6: if Komolec is Zgoraj then
• pretvorba kroˇznih izsekov v translacije, kjer je to po- 7: AcmaIzhod.append(”@77 13 +0\n”);
trebno. 8: end if
9: if Zapestje is N izko then
V nadaljevanju ˇclanka opisujemo omenjene glavne dele po- 10: AcmaIzhod.append(”@77 @77 13 +0\n”);
drobneje. 11: end if
3.2.1 Zajem podatkov in struktura numericˇnega pro- Pri doloˇcitvi konfiguracije je potrebno biti pozoren na trans-
grama za ucˇenje tocˇk za robota ACMA XR701 formacijo koordinatnega sistema, saj se pri normalni konfi-
guraciji (Rama:levo, Komolec:zgoraj in Zapestje:nizko) ko-
Robota ACMA programiramo prek medija (magnetno zapi- ordinatni sistem robotske celice transformira os x za 180◦
sana zgoˇsˇcenka) s sintakso za dodajanje toˇck. Za programi- in os z za 180◦ v koordinatni sistem orodja, prikazano na
ranje moramo zapisati v niz doloˇceno zaporedje znakov za Sliki 5.
dodajanje toˇck linearnih gibov oz. translacij. V ta namen
strukturiramo glavo, vsebino toˇck in nogo programa in je
zgrajena z zaporedja klikov, ki so opredeljeni v Tabeli 1.
Tabela 1: Vrednosti tipk konzole za programiranje
robota ACMA @59
Izbira menija ’x’ F1
Vrednost ”x” F6 @64
Tab 09 F9 @67
Enter 13 F10 @68
Esc 27 Tipka desno @77
Niˇcelno toˇcko polizdelka, postavitev robota, toˇcke gibov oz. Slika 5: Koordinatni sistemi robota [3]
translacij in druge manj pomembne podatke pridobimo z
javno metodo Vhodni Podatki. Te podatke pridobimo prek Vsebina programa ACMA je sestavljena z vpisovanjem toˇck
GUI in jih arhiviramo v razred Pridobitev Koordinat. Pred in poteka na enak naˇcin, kot dodajanje niˇcelne toˇcke. Raz-
uporabo je nize potrebno ustrezno pretvoriti glede na upo- likuje se v tem, da ˇse dodamo hitrost v in pospeˇsek a prika-
rabo zasebnih metod. Z metodami Izpis Glave Programa zano na Sliki 6.
ACMA, Izpis Koordinat Programa ACMA, Izpis Vrstice G
kode in Izpis Noge Programa ACMA polnimo niz znakov, glede @64 "X"09"Y"09"Z"09"A"09"B"09"C" +@68
na strukturo opredeljeno s Sliko 3 in Sliko 4 ter z Algorit- 13 +0 "v" 13 +0 "a" 13 +0
mom 2, ki vrnejo sistemski niz za izpis v bogato tekstovno
polje RichTextBox. Za ponoven izpis smo z javno metodo Slika 6: Sekvenca za doloˇcanje toˇck, hitrosti in po-
Clear Data poˇcistili spremenljivki za izpisovanje izhodne G- speˇska
kode in programa ACMA za uˇcenje toˇck ter priredili spre-
menljivkam znotraj razreda vrednost 0, ki doloˇcajo prazno
vrstico in pridobivajo vrednosti posamezne koordinate, ki
opisuje podpoglavje 3.2.2.
27 27 +0 27 +0 ’3’ +0 ’1’ +0
@80 @80 @80 @80 @80 @80 @80 @80 +0 13
13 13 13 27
@64 "x"09"x"09"x"09"x"09"x"09"x" +@68
Slika 3: Sekvenca za nastavitev niˇcelne toˇcke Noga zakljuˇci program s sekvenco prikazano na Sliki 7.
’8’ @77 13 +0 13 +0 @77 @77 @77 13 +0 27 27 27 27 27 +0 @59
Slika 4: Sekvenca za nastavitev naˇcina dodajanje Slika 7: Sekvenca noge programa ACMA za doda-
koordinat janje toˇck
StuCoSReC Proceedings of the 2018 5th Student Computer Science Research Conference 30
Ljubljana, Slovenia, 9 October