Page 25 - Fister jr., Iztok, and Andrej Brodnik (eds.). StuCoSReC. Proceedings of the 2017 4th Student Computer Science Research Conference. Koper: University of Primorska Press, 2017
P. 25
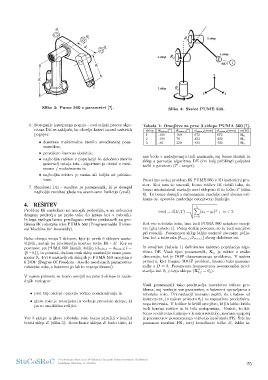
ka 3: Puma 560 s parametri [?]. Slika 4: Skelet PUME 560.
6. Doseganje izstopnega pogoja - evolucijski proces algo- Tabela 1: Omejitve za prve 3 sklepe PUMA 560 [?].
ritma DE se zakljuˇci, ko obvelja kateri izmed naˇstetih
pogojev: sklep θmin,i(◦) θmax,i(◦) dmin,i(mm) dmax,i(mm) os(R)
• doseˇzeno maksimalno ˇstevilo ovrednotenj posa- 1 -160 160 672 672 Ry
meznikov,
2 -180 70 432 432 Rz
• preseˇzeno ˇcasovno obdobje,
• najboljˇsa reˇsitev v populaciji ˇze doloˇceno ˇstevilo 3 -45 220 433 433 Rz
generacij ostaja ista - algoritem je obstal v mini- nas bodo v nadaljevanju tudi zanimale, saj bomo skuˇsali ta
mumu / maksimumu in sklep s pomoˇcjo algoritma DE ˇcim bolj pribliˇzati poljubni
• najboljˇsa reˇsitev je enaka ali boljˇsa od priˇcako- toˇcki v prostoru (T - target).
vane.
Preselimo sedaj problem IK PUME 560 v 3D karteziˇcni pro-
7. Rezultati DE - rezultat je posameznik, ki je dosegel stor. Kot smo ˇze omenili, bomo reˇsitev IK dobili tako, da
najboljˇsi rezultat glede na ocenitveno funkcijo (eval). bomo minimizirali razdaljo med sklepom E in toˇcko T (slika
4). To bomo dosegli z raˇcunanjem razdalje med dvema toˇc-
4. REŠITEV kama oz. uporabo naslednje ocenitvene funkcije:
Problem IK zasledimo na mnogih podroˇcjih, a na nobenem n
drugem podroˇcju ne pride tako do izraza kot v robotiki.
Iz tega razloga bomo predlagano reˇsitev predstavili na pro- eval = d(E, T ) = (xi − yi)2 ; n < 3.
blemu IK robotske roke PUMA 560 (Programmable Univer-
sal Machine for Assembly). i=0
Roka obsega vsega 7 sklepov, kjer je prvih 6 sklepov nasta- Kot vse robotske roke, ima tudi PUMA 560 nekatere omeji-
vljivih, zadnji pa predstavlja konˇcno toˇcko IK - E. Ker so tve (glej tabelo 1). Poleg dolˇzin povezav, so tu tudi omejitve
povezave pri PUMA 560 fiksnih dolˇzin (dmin,i = dmax,i; i = pri rotaciji. Posamezen sklep lahko namreˇc zavzame polju-
{0−6}), to pomeni, da ima vsak sklep nastavljiv samo para- ben kot z intervala [θmin,i, θmax,i] okrog doloˇcene osi.
meter θi. Pri 6 nastavljivih sklepih je PUMA 560 omejena s
6 DOF (Degree Of Freedom - ˇstevilo neodvisnih parametrov Iz omejitev (tabela 1) definiramo zaˇcetno populacijo algo-
robotske roke, s katerimi jo lahko manipuliramo).
ritma DE. Vsak njen posameznik, Xi, je vektor z enako
V naˇsem primeru se bomo omejili na prve 3 sklepe iz nasle- dimenzijo, kot je DOF obravnavanega problema. V naˇsem
dnjih razlogov:
primeru, kjer imamo 3DOF problem, imamo tako posame-
• prvi trije sklepi opravijo veˇcino pozicioniranja in
znike z D = 3. Posamezna komponenta posameznika pred-
• glava roke je rotacijska in vsebuje preostale sklepe, ki stavlja kot θi j-tega sklepa (Xi0,j = θj).
pa so analitiˇcno reˇsljivi.
Vsak posameznik tako predstavlja morebitno reˇsitev pro-
Vse 3 sklepe iz glave robotske roke bomo zdruˇzili v konˇcni blema, saj vsebuje vse parametre, s katerimi upravljamo z
ˇcetrti sklep E (slika 3). Koordinate sklepa E bodo tiste, ki robotsko roko. Pri mutaciji moramo paziti, da s katero od
komponent, (v naˇsem primeru θj) ne zapustimo predefinira-
nega intervala. V kolikor bi krˇsili omejitve, bi jih lahko krˇsila
tudi konˇcna reˇsitev in bi bila nedopustna. Vsakiˇc, ko kli-
ˇcemo ocenitveno funkcijo v koraku selekcije, moramo najprej
iz parametrov posameznega vektorja izraˇcunati FK. Sˇele ko
poznamo rezultat FK, torej koordinate toˇcke E, lahko iz-
StuCoSReC Proceedings of the 2017 4th Student Computer Science Research Conference 25
Ljubljana, Slovenia, 11 October
6. Doseganje izstopnega pogoja - evolucijski proces algo- Tabela 1: Omejitve za prve 3 sklepe PUMA 560 [?].
ritma DE se zakljuˇci, ko obvelja kateri izmed naˇstetih
pogojev: sklep θmin,i(◦) θmax,i(◦) dmin,i(mm) dmax,i(mm) os(R)
• doseˇzeno maksimalno ˇstevilo ovrednotenj posa- 1 -160 160 672 672 Ry
meznikov,
2 -180 70 432 432 Rz
• preseˇzeno ˇcasovno obdobje,
• najboljˇsa reˇsitev v populaciji ˇze doloˇceno ˇstevilo 3 -45 220 433 433 Rz
generacij ostaja ista - algoritem je obstal v mini- nas bodo v nadaljevanju tudi zanimale, saj bomo skuˇsali ta
mumu / maksimumu in sklep s pomoˇcjo algoritma DE ˇcim bolj pribliˇzati poljubni
• najboljˇsa reˇsitev je enaka ali boljˇsa od priˇcako- toˇcki v prostoru (T - target).
vane.
Preselimo sedaj problem IK PUME 560 v 3D karteziˇcni pro-
7. Rezultati DE - rezultat je posameznik, ki je dosegel stor. Kot smo ˇze omenili, bomo reˇsitev IK dobili tako, da
najboljˇsi rezultat glede na ocenitveno funkcijo (eval). bomo minimizirali razdaljo med sklepom E in toˇcko T (slika
4). To bomo dosegli z raˇcunanjem razdalje med dvema toˇc-
4. REŠITEV kama oz. uporabo naslednje ocenitvene funkcije:
Problem IK zasledimo na mnogih podroˇcjih, a na nobenem n
drugem podroˇcju ne pride tako do izraza kot v robotiki.
Iz tega razloga bomo predlagano reˇsitev predstavili na pro- eval = d(E, T ) = (xi − yi)2 ; n < 3.
blemu IK robotske roke PUMA 560 (Programmable Univer-
sal Machine for Assembly). i=0
Roka obsega vsega 7 sklepov, kjer je prvih 6 sklepov nasta- Kot vse robotske roke, ima tudi PUMA 560 nekatere omeji-
vljivih, zadnji pa predstavlja konˇcno toˇcko IK - E. Ker so tve (glej tabelo 1). Poleg dolˇzin povezav, so tu tudi omejitve
povezave pri PUMA 560 fiksnih dolˇzin (dmin,i = dmax,i; i = pri rotaciji. Posamezen sklep lahko namreˇc zavzame polju-
{0−6}), to pomeni, da ima vsak sklep nastavljiv samo para- ben kot z intervala [θmin,i, θmax,i] okrog doloˇcene osi.
meter θi. Pri 6 nastavljivih sklepih je PUMA 560 omejena s
6 DOF (Degree Of Freedom - ˇstevilo neodvisnih parametrov Iz omejitev (tabela 1) definiramo zaˇcetno populacijo algo-
robotske roke, s katerimi jo lahko manipuliramo).
ritma DE. Vsak njen posameznik, Xi, je vektor z enako
V naˇsem primeru se bomo omejili na prve 3 sklepe iz nasle- dimenzijo, kot je DOF obravnavanega problema. V naˇsem
dnjih razlogov:
primeru, kjer imamo 3DOF problem, imamo tako posame-
• prvi trije sklepi opravijo veˇcino pozicioniranja in
znike z D = 3. Posamezna komponenta posameznika pred-
• glava roke je rotacijska in vsebuje preostale sklepe, ki stavlja kot θi j-tega sklepa (Xi0,j = θj).
pa so analitiˇcno reˇsljivi.
Vsak posameznik tako predstavlja morebitno reˇsitev pro-
Vse 3 sklepe iz glave robotske roke bomo zdruˇzili v konˇcni blema, saj vsebuje vse parametre, s katerimi upravljamo z
ˇcetrti sklep E (slika 3). Koordinate sklepa E bodo tiste, ki robotsko roko. Pri mutaciji moramo paziti, da s katero od
komponent, (v naˇsem primeru θj) ne zapustimo predefinira-
nega intervala. V kolikor bi krˇsili omejitve, bi jih lahko krˇsila
tudi konˇcna reˇsitev in bi bila nedopustna. Vsakiˇc, ko kli-
ˇcemo ocenitveno funkcijo v koraku selekcije, moramo najprej
iz parametrov posameznega vektorja izraˇcunati FK. Sˇele ko
poznamo rezultat FK, torej koordinate toˇcke E, lahko iz-
StuCoSReC Proceedings of the 2017 4th Student Computer Science Research Conference 25
Ljubljana, Slovenia, 11 October